Mining
DeepNav for Mining Intelligence and Operational Safety
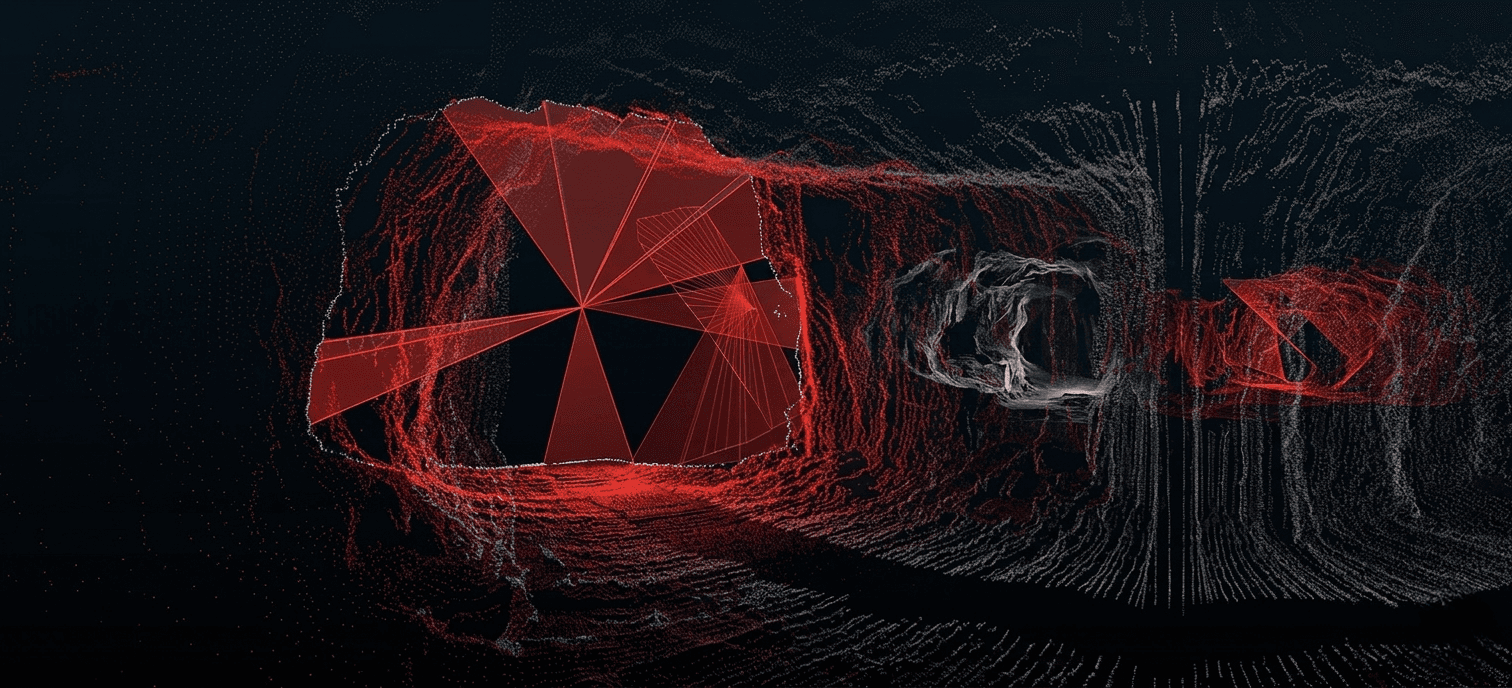
Underground mining operates in GNSS-denied environments where GPS is unavailable, limiting accurate positioning, worker safety, fleet coordination, and automation. Existing systems often lack the continuity, precision, and real-time referencing needed for advanced underground applications.
DeepNav combines LiDAR-based scanning with a portable positioning receiver to localize personnel, equipment, and vehicles in real time. It continuously updates tunnel maps with accurate spatial data, improving underground visibility, safety, and operational efficiency.

Why Underground Operations Need DeepNav
- GNSS-denied environments: Need reliable positioning for personnel, vehicles, and equipment.
- Limited location visibility: Increases safety and operational risks.
- Existing positioning and mapping: Cannot support real-time tracking and advanced underground applications.
- DeepNav capability: Enables underground tracking, planning, and autonomous vehicle navigation through real-time positioning and accurate map integration.
Smarter Underground Operations enable
 Precise Base Mapping
Precise Base Mappingaccurate positioning in GNSS-denied environments
Real Timetracking of personnel, equipment, and assets
Enabling Applicationsfrom underground tracking to autonomous vehicles
Assets & Operations We Enable

DeepNav
Real-time tracking of personnel, equipment, and vehicles
GPS-denied environments, precise localization, continuous operational visibility
DrillMate
Laser-guided alignment for accurate drilling and setup
Drill positioning, alignment errors, material waste and inefficiencies

